|
|
马上注册,结交更多好友,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?注册

x
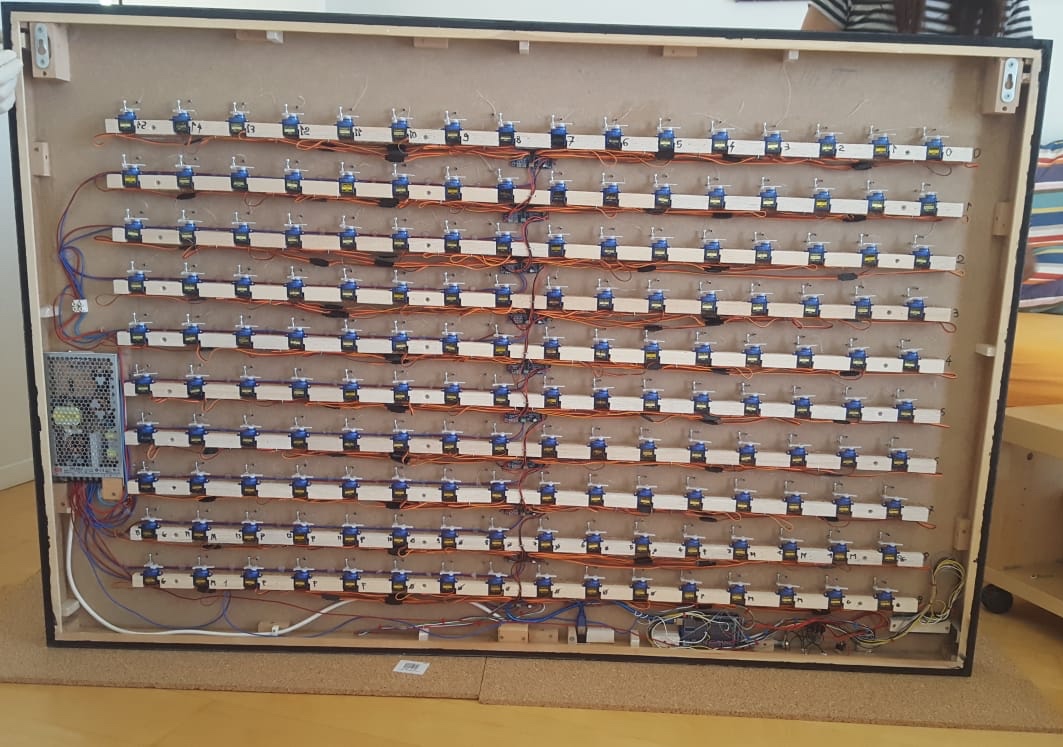
你喝过鸡尾酒么?是自己调制的么?我没有喝过,但是做了一个鸡尾酒主题交互伞?喜欢么?想自己试一试不?可以私信我要源代码哦。对了,在此声明,此分享不是商业作品,非成套售卖品,感兴趣的可以私信我或者留邮箱等联系方式分享更多细节和资料,然后自己动手做一个。
视频放不上来。。。。。。。。。。。先给几张图片吧


- #include <SPI.h>
- #include <SD.h>
- #include "LcDef.h"
- #include <Wire.h>
- #include <Adafruit_PWMServoDriver.h>
- #include <LiquidCrystal.h>
- LiquidCrystal lcd(4, 6, 9, 11, 12, 13);
- File myFile;
- Adafruit_PWMServoDriver pwm1 = Adafruit_PWMServoDriver(0x40);
- Adafruit_PWMServoDriver pwm2 = Adafruit_PWMServoDriver(0x41);
- Adafruit_PWMServoDriver pwm3 = Adafruit_PWMServoDriver(0x42);
- Adafruit_PWMServoDriver pwm4 = Adafruit_PWMServoDriver(0x43);
- Adafruit_PWMServoDriver pwm5 = Adafruit_PWMServoDriver(0x44);
- Adafruit_PWMServoDriver pwm6 = Adafruit_PWMServoDriver(0x45);
- Adafruit_PWMServoDriver pwm7 = Adafruit_PWMServoDriver(0x46);
- Adafruit_PWMServoDriver pwm8 = Adafruit_PWMServoDriver(0x47);
- Adafruit_PWMServoDriver pwm9 = Adafruit_PWMServoDriver(0x48);
- Adafruit_PWMServoDriver pwm10 = Adafruit_PWMServoDriver(0x49);
- Adafruit_PWMServoDriver servoligne[10] {pwm10,pwm9,pwm8,pwm7,pwm6,pwm5,pwm4,pwm3,pwm2,pwm1};
- int degremin=40;
- int degremax=120;
- int valeurmax=map(degremax,0,180,150,550);
- int valeurmin=map(degremin,0,180,150,550);
- int tabvaleurmin[10][16];
- int tabvaleurmax[10][16];
- int angleconsigne=degremin;
- #define bouton1on (!digitalRead(24))
- #define bouton2on (!digitalRead(26))
- #define bouton3on (!digitalRead(28))
- #define bouton4on (!digitalRead(30))
- byte bouton1onprevious=0;
- byte bouton2onprevious=0;
- byte bouton3onprevious=0;
- byte bouton4onprevious=0;
- int valeurbouton1=0;
- int valeurbouton2=0;
- int valeurbouton3=0;
- int valeurbouton4=0;
- byte ausuivant=0;
- int prochainecol=0;
- int angle[10 ] [ 16];
- void setup()
- {
- pinMode(24,INPUT_PULLUP);
- pinMode(26,INPUT_PULLUP);
- pinMode(28,INPUT_PULLUP);
- pinMode(30,INPUT_PULLUP);
- for (int x=0;x<=9;x++)
- {
- servoligne[x].begin();
- servoligne[x].setPWMFreq(60);
- }
- lcd.begin(16, 2);
- Serial.begin(9600);
- delay(1000);
- randomSeed(analogRead(0));
- for(int y=0;y<=9; y++) {
- for( int x=0;x<=15;x++) {
- tabvaleurmin[y][x]=150;
- tabvaleurmax[y][x]=550;
- }
- }
- Serial.print("Initializing SD card...");//
- lcdaffiche("Initializing SD card...","");
- if (!SD.begin(53)) {// *
- Serial.println("initialization failed!");//
- lcdaffiche("carte SD pas OK","");
- delay(4000);
- //return;// *
- }//
- else{//*
- Serial.println("initialization done.");//
- lcdaffiche("carte SD OK","");
- delay(4000);
- lecturecartesd("tabmin.txt",tabvaleurmin);
- lecturecartesd("tabmax.txt",tabvaleurmax);
- }
- }
- void loop()
- {
- reglage();
- menu();
- balle();
- eclosion();
- propagation();
- mouvementsynchrone();
- mouvementsinusoidal();
- mouvementsinusimage();
- lettre("HELLO[[[");
- if(quelboutonpese()==4){menu();}
- }
|
|




 发表于 2019-4-10 05:47
发表于 2019-4-10 05:47